

[SatNews] Honeybee Robotics Spacecraft Mechanisms Corporation has started to develop flight models of its unique telerobotic end effectors for the Defense Advanced Research Projects Agency (DARPA) Phoenix on-orbit satellite assembly program.
Phase II of the project, which intends to lead up to design, assembly and validation of the flight units, builds on work the company started in July 2012.
The Phoenix program aims to demonstrate the feasibility of changing how satellites are built, from on the ground, to on-orbit, with the goal to reduce launch costs and increase responsiveness for the Department of Defense. DARPA’s goal is to create a robotic servicing satellite that can demonstrate this by harvesting a useful structural aperture (or antenna) from one of many satellites in the disposal orbit near GEO, then mount new “satlet” modules to the antenna to create power, communications and control for an effective new space system.
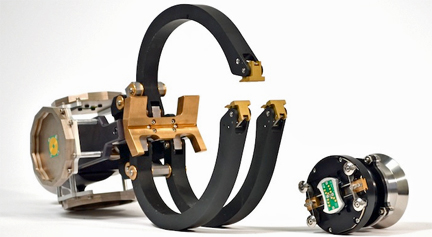
Honeybee Robotics' Universal Gripper Anchor.
Honeybee Robotics is developing two unique flight subsystems to enable DARPA’s robotically enabled servicer satellite to complete this mission. The first, the Universal Gripper Anchor (UGA), will be mounted onto the structural elements of the retired satellite’s aperture (antenna) by the servicer to create a stable, secure platform for the satlet modules. The UGA provides several electromechanical mounts for a variety of modular satlets to dock and communicate. The second subsystem, the Satlet Gripper Tool (SGT), is a new end effector for securing and manipulating the satlets using the servicing satellite’s robotic arms. The SGT incorporates a patent-pending omnidirectional electromechanical mounting system that provides multiple channels for the satlets to transmit data and power.
“During the first phase of development with DARPA Phoenix, Honeybee has provided creative solutions that enable a new flight architecture to build satellites on-orbit,” said Jason Herman, Director of Robotics and Automation Technology at Honeybee Robotics. “Performance testing indicates that our end effectors will operate reliably in the demanding environment of space, helping DARPA complete its exciting demonstration mission. We are proud to be supporting the Department of Defense with this program and contributing to the creation of new on-orbit assembly capabilities.”

The Phoenix mission is designed to demonstrate globally persistent, cost-effective communication capability creation on-orbit for the Department of Defense by robotically re-using GEO-based space apertures and antennas from de-commissioned satellites in the disposal, or “graveyard” orbit. A new class of “satlets” currently under development would be stored in a payload orbital delivery system and launched to GEO orbit economically as a hosted payload on a commercial satellite launch. Once in orbit, a separate servicing satellite would capture the satlets and begin servicing a retired communications satellite.
Honeybee has more than two decades of experience developing rugged, reliable end-effectors for the space and defense sectors.
To learn more about Honeybee Robotics' Universal Gripper Anchor, go to http://www.honeybeerobotics.com/component/content/article/26-robotics/endeffectors/203-darpa-phoenix-manipulators
For further information regarding the DARPA Technical Office, access http://www.darpa.mil/Our_Work/TTO/Programs/Phoenix.aspx